Spaß**)
---
# **Teilnehmer:innen** des Experiments
### Eigenschaften der $n = 12$ Teilnehmenden (Experiment 1)
Eigenschaft | Aufteilung
-----------------------------------:|:---------------------------------------------------
Geschlecht | 7 männlich, 5 weiblich
Alter | Min: 21, Max: 37, Mittelwert: 28 Jahre
Brillen/Kontaktlinsen in der Studie | 5 mit, 7 ohne
Rechts- bzw. Linkshändige | 9 Rechts-, 3 Linkshändige
Erfahrung mit 3D-Spielen | Min: 1, Max: 7, Mittelwert: 3,5 (Skala von 1 bis 7)
Erfahrung mit VR | Min: 1, Max: 3, Mittelwert: 1,6 (Skala von 1 bis 7)
---
# Durchgeführte **Experimente**
## Umgebung
- Teilnehmer:innen über Aufgaben informiert
- Labor-Umgebung mit *HTC Vive* und Kopfhörern
- Optische Überwachung des Verhaltens
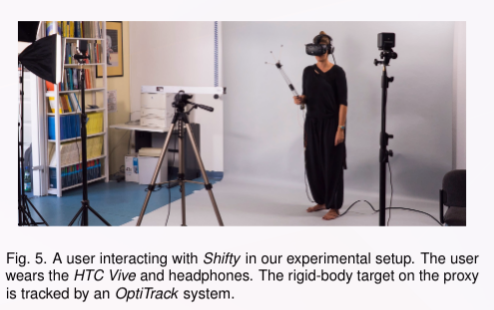
- Freie Bewegung innerhalb der Umgebung
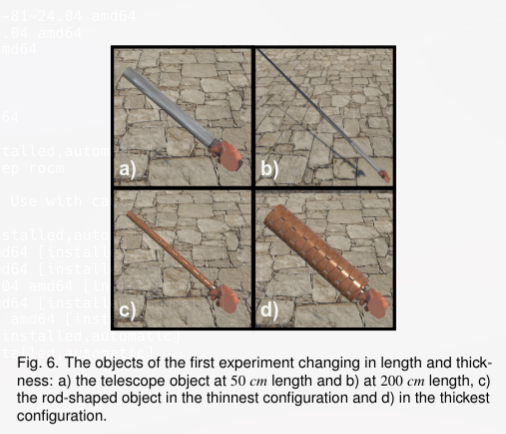
- Mit virtuellem Teleskop in der Hand
- 1\. Phase mit Bewegung des Gewichts (DPHF)
- 2\. Phase ohne Bewegung des Gewichts (PHF)
- Reihenfolge der 1. und 2. Phase zufällig
- ➕- und ➖-Props in der Umgebung,
um Länge und Dicke linear zu ändern
- Ergebnisse in Skala von 1 bis 7 gesammelt
Das Gewicht bewegt sich aber langsam !
Kann man trotzdem (realistisch) schwere Objekte heben ?
---
# **Teilnehmer:innen** des Experiments
### Eigenschaften der $n = 12$ Teilnehmenden (Experiment 2)
Eigenschaft | Aufteilung
-----------------------------------:|:---------------------------------------------------
Geschlecht | 9 männlich, 3 weiblich
Alter | Min: 21, Max: 37, Mittelwert: 27 Jahre
Brillen/Kontaktlinsen in der Studie | 6 mit, 6 ohne
Rechts- bzw. Linkshändige | 10 Rechts-, 2 Linkshändige
Erfahrung mit 3D-Spielen | Mittelwert: 2,9 (Skala von 1 bis 7)
Erfahrung mit VR | Min: 1, Max: 4, Mittelwert: 1,8 (Skala von 1 bis 7)
---
# Experiment 2: **virtuelle Objekte heben**
- Würfel verschiedener Größen sollen aus
einem **Inventar** genommen werden
- Nach dem Greifen soll der Würfel in
die **richtige Lage** gebracht werden
- Kombinationen von 6 Varianten werden
nach einer **Latin Square Approach**
von den Teilnehmenden verglichen
- Anhand der Vergleichsergebnisse
wird ein **Score** für Metriken berechnet
### Getestete Varianten
Name | 🖐️ | 👁️ | 👂
------------------:|:----:|:--------------:|:-------:
`Base` | PHF | :x: | :x:
`Hapt` | DPHF | :x: | :x:
`Prog` | DPHF | *Progress Bar* | *Whoosh*
`Scal` | DPHF | *Skalierung* | *Whoosh*
`Trans` | DPHF | *Transparenz* | *Whoosh*
`Mask` | DPHF | *Rauch* | *Whoosh*
### Gemessene Metriken
**Realismus**, **am wenigsten beunruhigend**, **Anstrengung**, **Spaß**, **Präferenz**
## Latin-Square mit $6$ Parametern
* **Position**: Varianten werden an jeder Position einmal getestet
* **Teilnehmer:innen** testen jede
Variante einmal
* **Reihenfolge**: Für jedes Paar von Varianten $(v_1, v_2)$ gilt:
$N_{v_1\space vor\space v_2} = N_{v_2\space vor\space v_1}$
(Beispiel-Einträge, vgl. [4])
### Variante nach **Teilnehmer:in** und **Position**
Position $\downarrow$|$T_1$|$T_2$|$T_3$|$T_4$|$T_5$|$T_6$|Vergleich
:-|:-:|:-:|:-:|:-:|:-:|:-:|-:
1|A|B|C|D|E|F|:x:
2|B|C|D|E|F|A|2\. vs 1\.
3|F|A|B|C|D|E|3\. vs 2\.
4|C|D|E|F|A|B|4\. vs 3\.
5|E|F|A|B|C|D|5\. vs 4\.
6|D|E|F|A|B|C|6\. vs 5\.
* $v_1\xrightarrow{besser\space als}v_2: \text{+2 Punkte für } v_1$
* $v_1\xrightarrow{gleich\space wie}v_2: \text{+1 Punkt für beide}$
## Vorteile
- **interessante Entwicklung**
- **Realismus** und **Spaß** werden bei **tragbaren Kosten** erhöht
## Nachteile
- nur ein **Forschungsprojekt**
- nur 1-dimensionales Trägheitsmoment (weit von AHF entfernt)
- **Anstrengung** soll berücksictigt werden
- Andere Aspekte des hapt. Feedbacks wie Textur und Form nicht geändert
## PDF
[](https://pages.ct.cozytren.ch/sti-presentation/presentation.pdf)
## HTML
[](https://pages.ct.cozytren.ch/sti-presentation)
## Repository
[](https://gitea.ct.cozytren.ch/romane/sti-presentation)